 be an array of 2D vectors of shape
be an array of 2D vectors of shape  :
:I can never remember the difference between left and right multiplying transform matrices, so I’m writing all this down mostly for myself.
Let be an array of 2D vectors of shape :

Let  be a
be a  degrees counterclockwise rotation matrix:
degrees counterclockwise rotation matrix:

Expressed with a right multiply, the rotated  would be
would be
^T")
Note the shapes: is and is  , so we end up with
, so we end up with (N \times 2)^T)^T") . In numpy for a 30 degree counterclockwise
rotation:
. In numpy for a 30 degree counterclockwise
rotation:
v = np.array([[0.8, 0], [0.9, 0.1], [1, 0.2]])
def make_rotation_matrix(K_rad):
return np.array([[np.cos(K_rad), -np.sin(K_rad)],
[np.sin(K_rad), np.cos(K_rad)]])
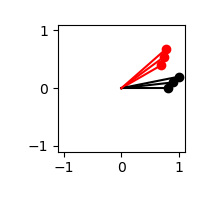
vprime = (make_rotation_matrix(np.deg2rad(30)) @ v.T).Twhich, visualized as vectors from the origin, produces the expected result:
Expressed with a left multiply, the rotated would be

Note the shapes: is and is , so we end up with (2 \times 2)") . In
numpy:
. In
numpy:
vprime = v @ make_rotation_matrix(np.deg2rad(30)).Twhich again visualized as vectors from the origin produces the same result:
Imagine instead of a simple rotation by , we also wanted to transform the points
that included a translation ") . We
could represent this as two separate operations, a rotation and a
translation, or we could represent it as a single homogeneous transform
. We
could represent this as two separate operations, a rotation and a
translation, or we could represent it as a single homogeneous transform
 :
:

where is the same rotation matrix as before, and  is the column version of the
translation vector (i.e.
is the column version of the
translation vector (i.e.  ). To do this, we augment the vectors with a third column of ones,
i.e.
). To do this, we augment the vectors with a third column of ones,
i.e.

making it an  matrix. The homogeneous
transform is a
matrix. The homogeneous
transform is a  matrix, so we can left
multiply it with to get the transformed
matrix, so we can left
multiply it with to get the transformed  :
:

In numpy
def make_transform_matrix(K_rad, translation):
return np.array([[np.cos(K_rad), -np.sin(K_rad), translation[0]],
[np.sin(K_rad), np.cos(K_rad), translation[1]],
[0, 0, 1]])
def make_homogeneous(v):
return np.hstack((v, np.ones((v.shape[0], 1))))
vprime_h = v_h @ make_transform_matrix(rotation, translation).Twhich, visualized as vectors from the origin, produces the expected result:
![]()