ZeroFlow:
Scalable Scene Flow via Distillation
News:
Jan 16th, 2024: ZeroFlow was accepted to ICLR
2024!
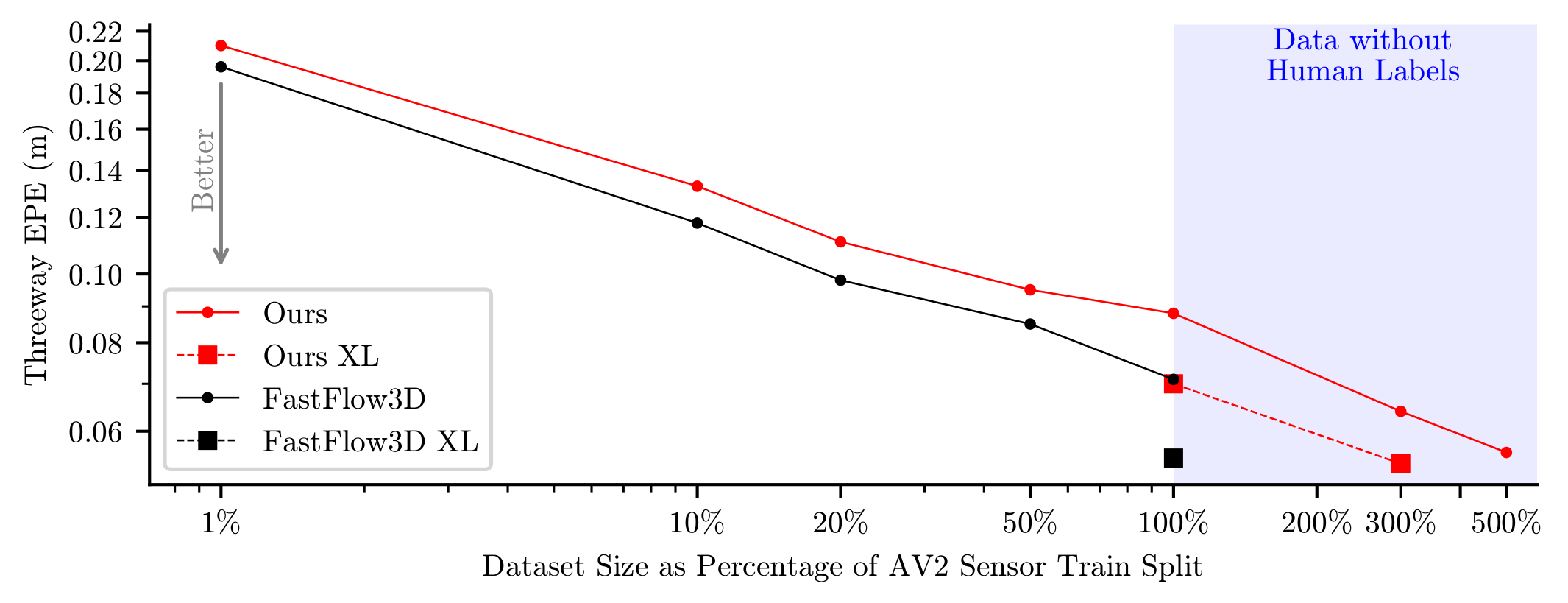
Jul 28th, 2023: We scaled up the ZeroFlow pipeline on
additional point clouds from the unlabeled Argoverse 2 LiDAR dataset.
With 3x the data, we beat the supervised baseline and teacher
performance; with 3x the data and a bigger backbone, we are
state-of-the-art on the Argoverse
2 Self-Supervised Scene Flow Leaderboard! Scaling ZeroFlow on raw
data logs is all you need to build state-of-the-art scene flow methods —
AV companies should try this on their internal
logs!
Jun 18th, 2023: ZeroFlow was selected as a
highlighted method in the CVPR 2023 Workshop on
Autonomous Driving Scene
Flow Challenge!
Abstract:
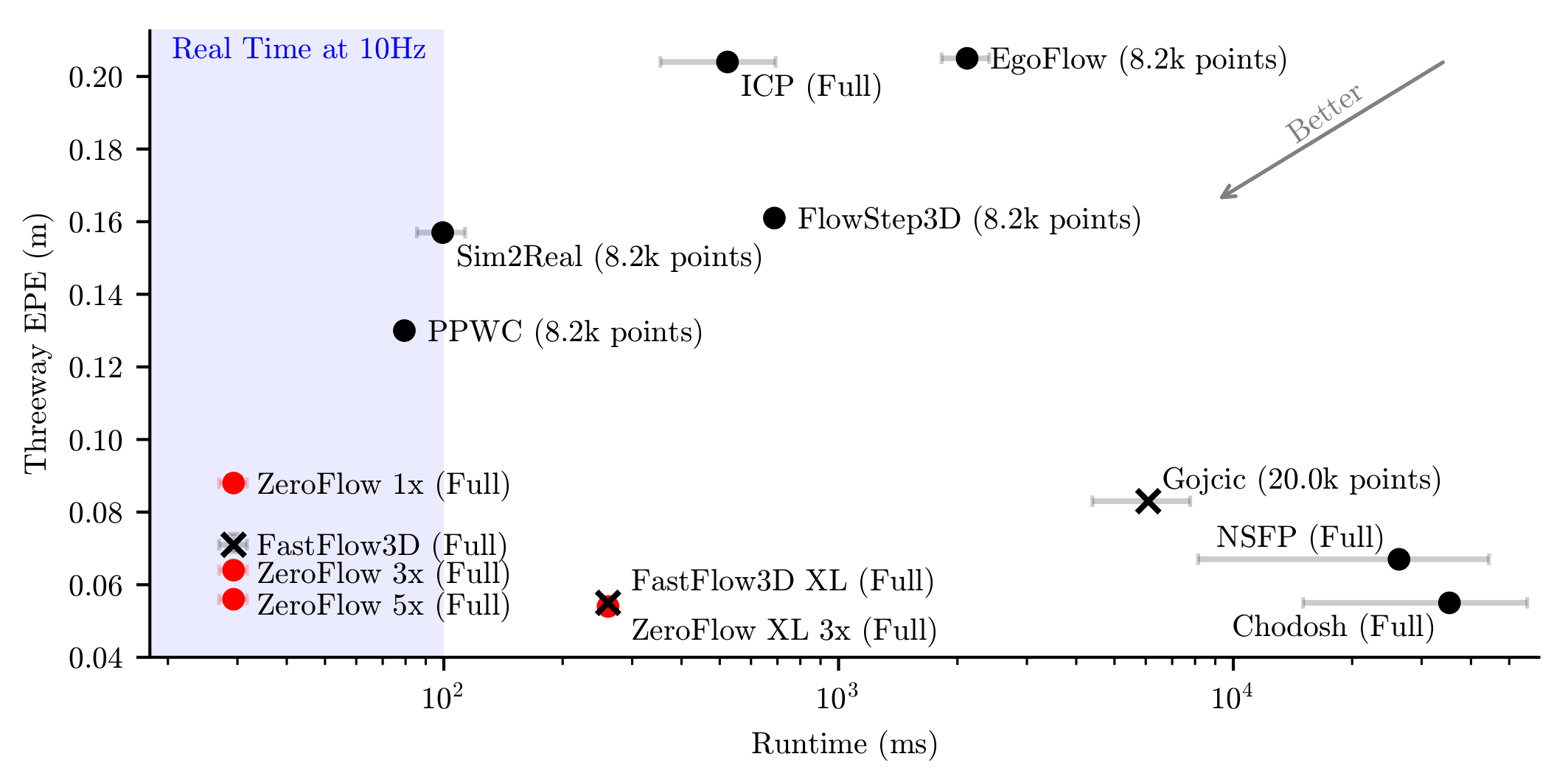
Scene flow estimation is the task of describing the 3D motion field
between temporally successive point clouds. State-of-the-art methods use
strong priors and test-time optimization techniques, but require on the
order of tens of seconds to process large-scale point clouds, making
them unusable as computer vision primitives for real-time applications
such as open world object detection. Feed forward methods are
considerably faster, running on the order of tens to hundreds of
milliseconds for large-scale point clouds, but require expensive human
supervision. To address both limitations, we propose Scene Flow via
Distillation, a simple, scalable distillation framework that uses a
label-free optimization method to produce pseudo-labels to supervise a
feed forward model. Our instantiation of this framework,
ZeroFlow, achieves state-of-the-art
performance on the Argoverse 2 Self-Supervised Scene Flow
Challenge while using zero human labels by simply training on
large-scale, diverse unlabeled data. At test-time, ZeroFlow is over
1000 faster than
label-free state-of-the-art optimization-based methods on large-scale
point clouds and over 1000 cheaper to train on
unlabeled data compared to the cost of human annotation. To facilitate
further research, we will release our code, trained model weights, and
high quality pseudo-labels for the Argoverse 2 and Waymo Open
datasets.
faster than
label-free state-of-the-art optimization-based methods on large-scale
point clouds and over 1000 cheaper to train on
unlabeled data compared to the cost of human annotation. To facilitate
further research, we will release our code, trained model weights, and
high quality pseudo-labels for the Argoverse 2 and Waymo Open
datasets.
Key Insights:
Existing scene flow estimation methods are either slow but label free
test-time optimization methods, or fast but human supervised feed
forward networks. We construct the Scene Flow via Distillation
framework to break this tradeoff.
Our straight-forward instantiation of this in ZeroFlow shows that
simply training a supervised model with imperfect pseudo-labels can
exceed the performance of perfect human labels on substantial fraction
of the data. We think this is itself surprising, but we also think it
has highly impactful implications for the problem of scene flow
estimation: point cloud quantity and diversity is more important than
perfect flow label quality for training feed forward scene flow
estimators.
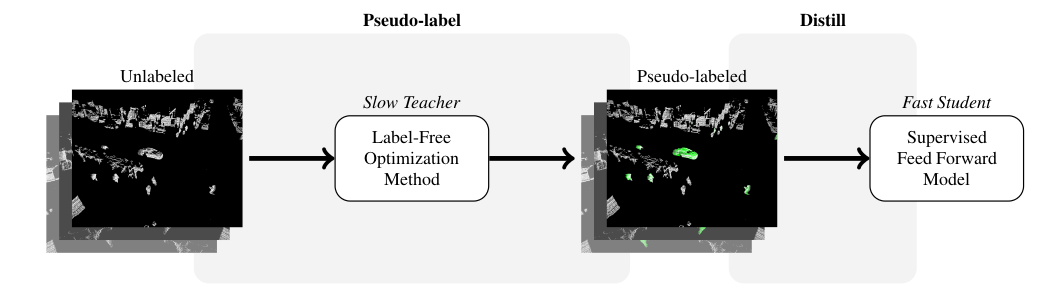
We instantiate this framework in ZeroFlow, a scene flow
method that scales to real world point clouds. ZeroFlow uses Neural
Scene Flow Prior, a high quality label-free optimization method, to
generate pseudolabels to train FastFlow3D, a fast, scalable feed forward
scene flow network. The resulting method is real-time and produces
state-of-the-art quality flows with zero human labels.
Full Paper and Downloads:
[Preprint PDF]
[Official
Code]
[Model
Weights]
Citation:
@inproceedings{vedder2024zeroflow,
author = {Vedder, Kyle and Peri, Neehar and Chodosh, Nathaniel and Khatri, Ishan and Eaton, Eric and Jayaraman, Dinesh and Liu, Yang and Ramanan, Deva and Hays, James},
title = {{ZeroFlow: Scalable Scene Flow via Distillation}},
journal = {Twelfth International Conference on Learning Representations (ICLR)},
year = {2024},
website = {http://vedder.io/zeroflow.html},
pdf = {https://arxiv.org/pdf/2305.10424.pdf}
}