I Can’t Believe It’s Not
Scene Flow!
* Equal contributions
Problem
1: Current scene flow methods fail on small objects
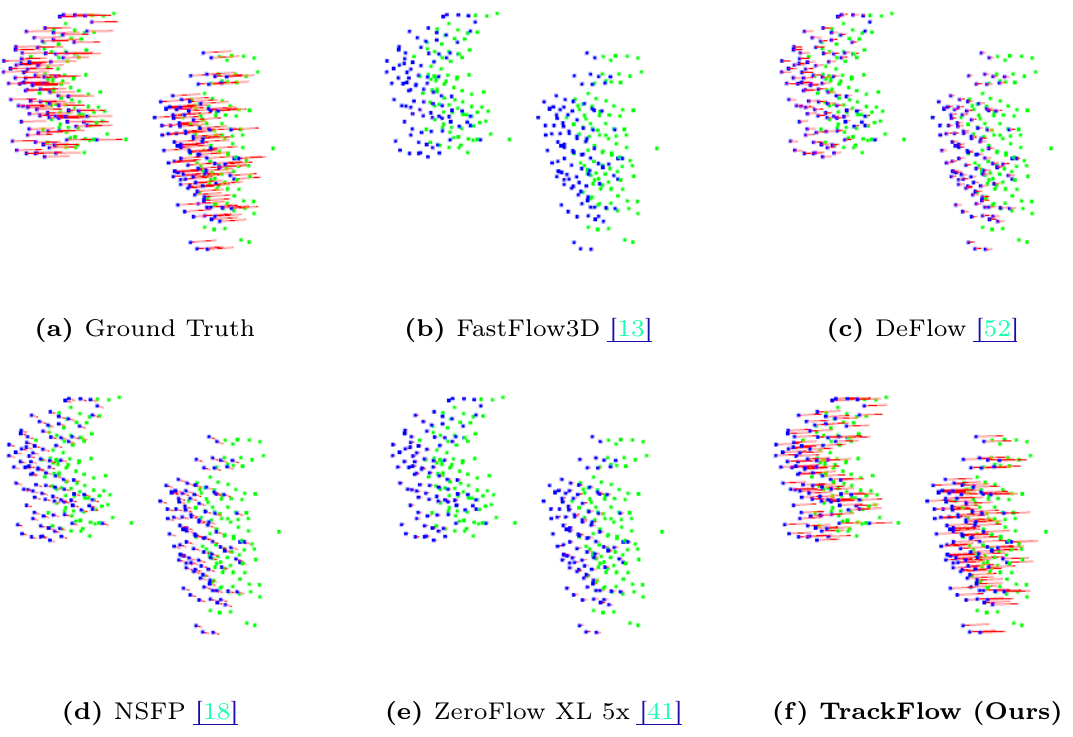 We visualize a cherry picked example of two moving pedestrians (walking
from left to right) with unusually high density lidar returns. We expect
state-of-the-art scene flow methods would work well on this easy
instance, but find that they fall short. Notably, our method
TrackFlow is the only method to estimate proper flow for these
pedestrians.
We visualize a cherry picked example of two moving pedestrians (walking
from left to right) with unusually high density lidar returns. We expect
state-of-the-art scene flow methods would work well on this easy
instance, but find that they fall short. Notably, our method
TrackFlow is the only method to estimate proper flow for these
pedestrians.
Problem
2: Standard eval metrics don’t capture this failure
Current eval metrics (Average EPE, Threeway EPE) are reporting
average error on the order of centimeters for state-of-the-art methods;
new papers push these errors down by small fractions of a centimeters.
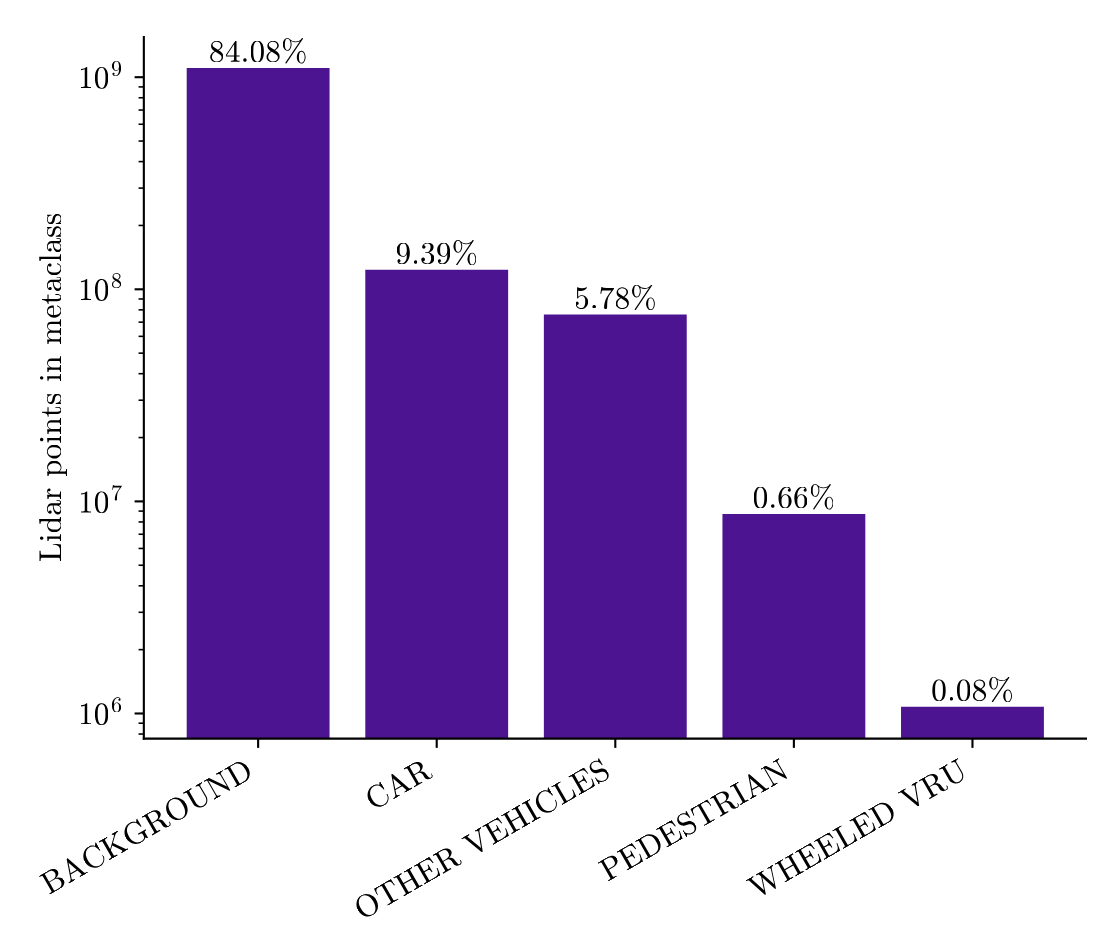
These metrics are not informative — due to point imbalances,
minor improvements on car motion estimation improves the metric by a
significant amount, while major failures on small objects are treated as
a rounding error.
Fix 1:
Measuring this failure with Bucket Normalized EPE
We propose a new evaluation protocol, Bucket Normalized EPE,
that is class-aware and speed-normalized.
Class-awareness allows us to break down the object distribution into
meaningful subsets, and speed normalization allows us to measure
percentage of motion described rather than metric space
error, enabling meaningful comparisons between cars moving at high
speeds and pedestrians moving at walking speeds.
Bucket Normalized EPE allows us to quantify the systematic
failures of current scene flow methods on small objects.
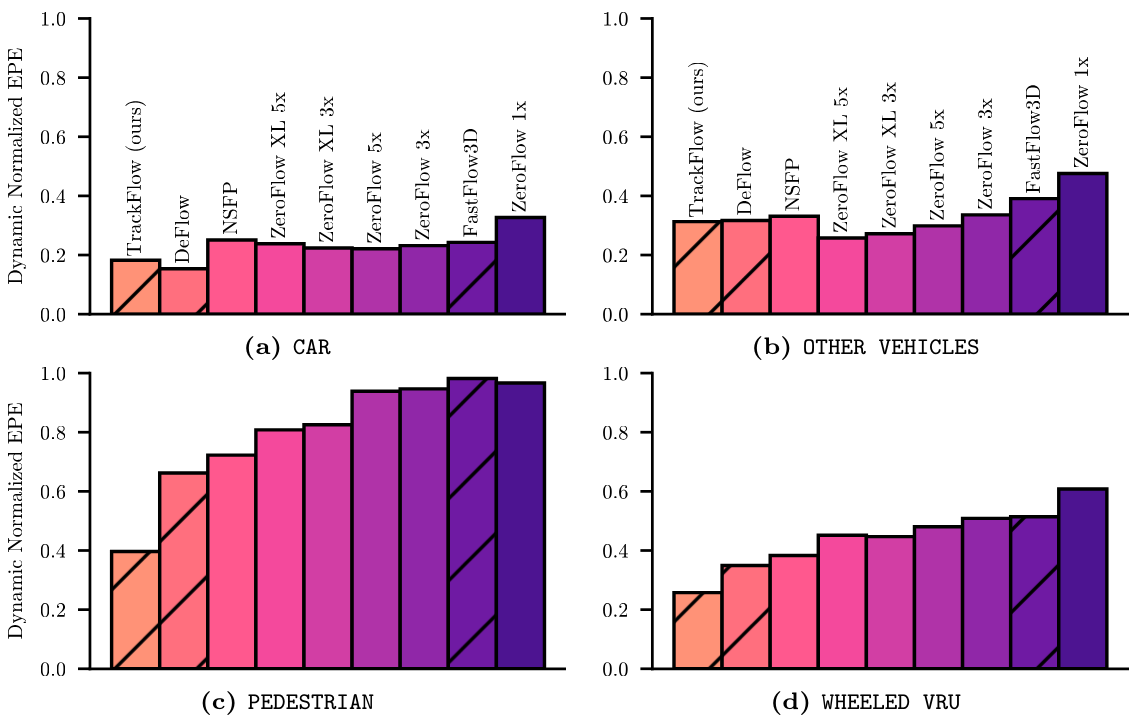 A collection of state-of-the-art supervised and unsupervised scene flow
estimation methods on Argoverse 2’s test split. Supervised
methods shown with hatching. Lower is better. Notably,
existing methods, supervised or unsupervised, fail to describe more than
50% of pedestrian motion (have
A collection of state-of-the-art supervised and unsupervised scene flow
estimation methods on Argoverse 2’s test split. Supervised
methods shown with hatching. Lower is better. Notably,
existing methods, supervised or unsupervised, fail to describe more than
50% of pedestrian motion (have >0.5 Dynamic Normalized
EPE), highlighting the enormity of the failure of current methods.
Fix 2:
Highlighting the low-hanging fruit with TrackFlow
We propose a simple supervised scene flow baseline,
TrackFlow, built by bolting a high-quality pretrained detector
(trained using many class rebalancing techniques) onto a simple tracker.
Despite this awkward formulation, TrackFlow not only produces
state-of-the-art performance on current standard evaluations, it
provides enormous improvements over prior art on our new
evaluation (e.g. describing almost 60% of pedestrian motion).
TrackFlow is as much a call to action as it is a method: such a
simple, cobbled together baseline thoroughly beating other (supervised!)
methods means the scene flow community needs to go back to basics.
Scene flow as a problem is not an end unto itself; it is only useful
as a primitive for downstream tasks. We present a new benchmark that
highlights failures on important classes of objects, and show that once
highlighted, even simple methods can make meaningful progress.
In service of future progress, we provide a very easy-to-use,
multi-dataset dataloader and scene flow evaluation toolkit for Bucket
Normalized EPE, and we have integrated it into our Scene Flow Zoo as
the standard method for evaluation.
Citation
@inproceedings{khatri2024trackflow,
author = {Khatri, Ishan and Vedder, Kyle and Peri, Neehar and Ramanan, Deva and Hays, James},
title = {{I Can't Believe It's Not Scene Flow!}},
journal = {European Conference on Computer Vision (ECCV)},
year = {2024},
pdf = {https://arxiv.org/abs/2403.04739},
website = {http://vedder.io/trackflow.html}
}